Problems involving dry friction are found in many engineering applications. Some deal with simple situations such as the block sliding on a plane as in the previous lesson. Many situations deal with the stability of rigid bodies in accelerated motion. These situations are examined in dynamics. Also, a number of common machines and mechanisms can be analyzed by applying the laws of dry friction. These include wedges, screws, journal and thrust bearings, and belt transmissions.
If a problem involves only a motion of translation, with no possible rotation, the body under consideration can usually be treated as a particle. If the problem involves a possible rotation, the body must be considered as a rigid body. If the structure considered is made of several parts, the principle of action and reaction must be used.
If the body considered is acted upon by more than three forces (including the reactions at the surfaces of contact), the reaction at each surface will be represented by its components N and F and the problem will be solved from the equations of equilibrium. If only three forces act on the body under consideration, it may be more convenient to represent each reaction by a single force R and to solve the problem by drawing a force triangle.
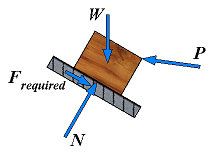
Most problems involving friction fall into one of the following three groups: In the first group of problems, all applied forces are given and the coefficients of friction are known; it may be determined whether the body considered will remain at rest or slide. The friction force F required to maintain equilibrium is unknown (its magnitude is not equal to μsN) and should be determined, together with the normal force N, by drawing a free-body diagram as shown and solving the equations of equilibrium:
The value found for the magnitude F of the friction force is then compared with the maximum value Fm = μsN. If F is smaller than or equal to Fm, the body remains at rest. If the value found for F is larger than Fm, equilibrium cannot be maintained and motion takes place; the actual magnitude of the friction force is then Fk = μkN.
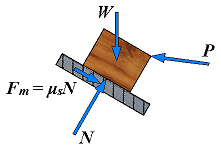
In problems of the second group, all applied forces are given and the motion is known to be impending—the value of the coefficient of static friction can be determined. Here again, the friction force and the normal force are determined by drawing a free-body diagram as shown and solving the equations of equilibrium:
Since it is not known that the value found for F is the maximum value Fm, the coefficient of friction may be found by writing and solving the equation Fm = μsN.
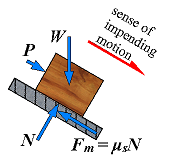
In problems of the third group, the coefficient of static friction is given, and it is known that the motion is impending in a given direction—the magnitude or the direction of one of the applied forces can be determined. The friction force should be shown in the free-body diagram with a sense opposite to that of the impending motion and with a magnitude Fm = μsN as shown:
The equations of equilibrium can then be written, and the desired force determined.
As noted above, when only three forces are involved it may be more convenient to represent the reaction of the surface by a single force R and to solve the problem by drawing a force triangle.
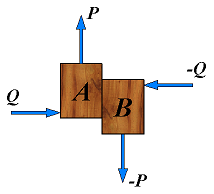
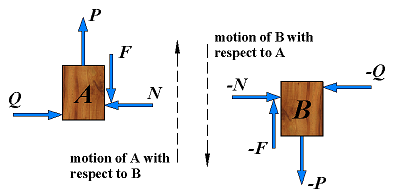
When two bodies A and B are in contact as shown:
the forces of friction exerted, respectively, by A on B and by B on A are equal and opposite (Newtons's third law). In drawing the free-body diagram of one of the bodies, it is important to include the appropriate friction force with its correct sense. The following rule should then be observed: The sense of the friction force acting on A is opposite to that of the motion (or impending motion) of A as observed from B, and in a similar way, the sense of the friction force acting on B is determined:
Note that the motion of A as observed from B is a relative motion. For example, if body A is fixed and body B moves, body A will have a relative motion with respect to B. Also, if both B and A are moving down but B is moving faster than A, body A will be observed, from B, to be moving up.